Comprendere il controllo della velocità del motore PWM con timer 555 in termini semplici
2025-10-13
13345
Catalogare
Cos'è un circuito PWM 555?
Un circuito PWM 555 utilizza un circuito integrato timer 555 per generare un segnale PWM (modulato in larghezza di impulso) un'onda quadra con tempi di accensione e spegnimento regolabili.Poiché l'uscita commuta completamente tra lo stato alto e quello basso, controlla in modo efficiente l'alimentazione di un carico, come un motore CC o un LED, senza sprecare energia sotto forma di calore.
Questo circuito è ampiamente utilizzato per il controllo della velocità del motore, l'attenuazione dei LED e la modulazione della potenza in applicazioni a potenza medio-bassa grazie alla sua semplicità, basso costo e affidabilità.
555 Pinout e funzioni del timer
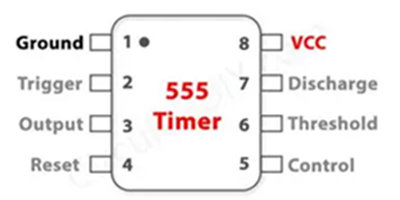
Figura 2. Configurazione dei pin di un CI timer 555 standard a 8 pin
|
Spillo |
Nome |
Funzione |
|
1 |
Terra (GND) |
Riferimento di massa del circuito. |
|
2 |
Grilletto |
Inizia il cronometraggio quando la tensione diminuisce
inferiore a 1/3 VCC. |
|
3 |
Produzione |
Fornisce segnale PWM (fino a 200
mA). |
|
4 |
Reset |
L'uscita della forza è bassa quando viene tirata
Basso. |
|
5 |
Tensione di controllo |
Regola le soglie interne. |
|
6 |
Soglia |
Termina la temporizzazione quando la tensione supera
2/3 VCC. |
|
7 |
Scarico |
Scarica il condensatore di temporizzazione quando
l'uscita è bassa. |
|
8 |
VCC |
Ingresso alimentazione (5–15 V). |
Principio di funzionamento del circuito PWM 555
Un circuito PWM 555 è una versione migliorata dell'oscillatore astabile 555 standard.Introduce un potenziometro e due diodi di pilotaggio che consentono il controllo indipendente del ciclo di lavoro mantenendo una frequenza di base stabile.Ciò lo rende ideale per applicazioni quali il controllo della velocità del motore CC, l'attenuazione dei LED e altri sistemi di modulazione della potenza.
Il funzionamento del circuito dipende principalmente da due componenti: R1 E C1, Quale impostare la frequenza di oscillazione—valori più piccoli aumentano la frequenza, mentre quelli più grandi la abbassano.Il potenziometro (RV1) regola il ciclo di lavoro modificando il rapporto tra i periodi di uscita alta e bassa.Insieme, questi elementi definiscono la velocità e la durata in cui il segnale di uscita rimane in ciascuno stato.
Perni 2 E 6 del timer 555 monitorare la tensione ai capi del condensatore di temporizzazione.Quando questa tensione raggiunge i due terzi della tensione di alimentazione (VCC), l'uscita passa allo stato basso;quando scende al di sotto di un terzo, l'uscita commuta nuovamente su alto.Questo costante processo di carica-scarica genera un segnale PWM continuo ad onda quadra sul pin 3.
Di variando il ciclo di lavoro, il circuito controlla la tensione media consegnato al carico. Un ciclo di lavoro più elevato aumenta la velocità del motore o la luminosità del LED, mentre uno inferiore la riduce.L'uscita può pilotare un MOSFET a livello logico che gestisce il flusso di corrente al motore.Agendo come un interruttore low-side, il MOSFET si accende e si spegne rapidamente in sincronia con il segnale PWM, mentre un diodo flyback sul motore protegge dai picchi di tensione dovuti a carichi induttivi.
Per un funzionamento efficiente, la frequenza PWM è generalmente impostata tra 15kHz e 20kHz, mantenendo il segnale al di sopra della gamma udibile mantenendo allo stesso tempo prestazioni fluide del motore.Se il MOSFET si surriscalda, utilizzarne uno con un valore RDS(on) inferiore o abbassare leggermente la frequenza può aiutare a ridurre al minimo le perdite di commutazione e migliorare la stabilità generale.
Comprensione dello schema elettrico del 555 PWM
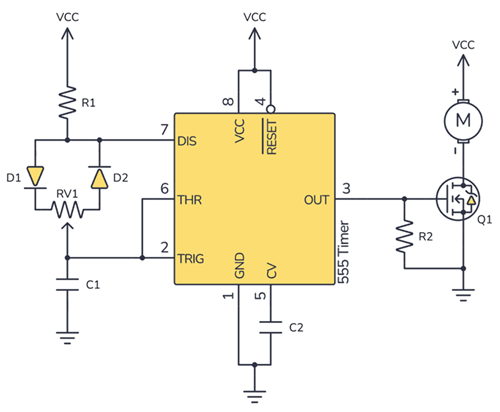
Figura 4. 555 Circuito di controllo della velocità del motore PWM
• Potenza e fornitura- Il circuito funziona a 5–15 V a seconda del motore.Il pin 8 si collega a VCC, il pin 1 a terra e il pin 4 a VCC per mantenere attivo il timer.Il pin 5 si collega a terra tramite un condensatore da 0,01 µF per stabilizzare la tensione.
• Rete di cronometraggio- Il condensatore C1 si collega tra i pin 2/6 e terra.I diodi D1 e D2 guidano la corrente attraverso parti separate del potenziometro, formando percorsi di carica e scarica diversi.Ciò consente un'ampia regolazione del ciclo di lavoro con una variazione minima di frequenza.
• Controllo della frequenza e del ciclo di lavoro- La frequenza del circuito è determinata da R1, R2 e C1.La regolazione del potenziometro modifica il rapporto tra tempo di accensione e spegnimento, controllando il ciclo di lavoro.L'uscita sul pin 3 commuta tra VCC e terra mentre il condensatore si carica e si scarica.
• Azionamento e protezione del motore- L'uscita dal pin 3 pilota un N-MOSFET a livello logico (come IRLZ44N).Il motore si collega tra VCC e lo scarico del MOSFET.Un diodo flyback (1N5819) sul motore impedisce ai picchi di tensione di danneggiare il MOSFET.
Componenti richiesti
|
Componente |
Scopo |
Note |
|
555 Temporizzatore IC |
Genera il segnale PWM. |
Utilizzare NE555 o LM555. |
|
MOSFET (IRLZ44N o simile) |
Commuta la corrente del motore. |
Utilizza il tipo a livello logico con basso
RDS(acceso). |
|
RV1: Potenziometro da 10 kΩ |
Regola il ciclo di lavoro. |
Consigliata la conicità lineare. |
|
R1: resistenza da 1 kΩ |
Imposta la frequenza base con R2 e
C1. |
Utilizzare una pellicola metallica per la precisione. |
|
R2: resistenza da 5 kΩ |
Aiuta a determinare la frequenza PWM. |
Pellicola metallica per stabilità. |
|
C1: condensatore da 100 nF |
Condensatore di temporizzazione. |
Controlla il periodo di oscillazione. |
|
C2: condensatore da 1 nF |
Bypassa il pin di controllo. |
Riduce il jitter e stabilizza
produzione. |
|
D1, D2: diodi 1N4148 |
Diodi di sterzo. |
Utilizzare il tipo a commutazione rapida. |
|
Diodo flyback: 1N5819 |
Protegge MOSFET dalla tensione
picchi. |
Tipo Schottky o a recupero rapido. |
|
Condensatori di disaccoppiamento |
Stabilizzare la tensione. |
100 nF vicino al circuito integrato;100–470 µF vicino
motore. |
|
Resistenza di gate: 50–150 Ω |
Riduce il rumore di commutazione. |
Facoltativo ma utile. |
|
Abbattimento cancello: 100 kΩ |
Mantiene il MOSFET spento all'avvio. |
Facoltativo ma consigliato. |
|
Motore CC |
Carico per il circuito. |
Abbina tensione e corrente di stallo
valutazioni. |
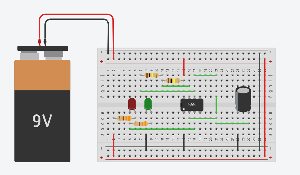
Assemblaggio del circuito PWM 555
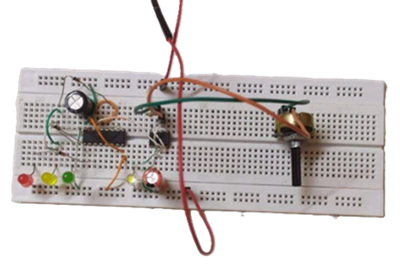
Figura 5. Assemblaggio breadboard di un circuito 555 PWM
Passaggio 1: alimentare il timer 555
Collegare il pin 8 a VCC e il pin 1 a terra.Collegare il pin 4 (RESET) direttamente a VCC in modo che il timer rimanga attivo.Aggiungere un condensatore da 10 nF dal pin 5 (CONTROL) a terra per stabilizzare la tensione di riferimento interna e ridurre l'interferenza del rumore.
Passaggio 2: costruire la rete di cronometraggio
Collegare insieme i pin 2 (TRIG) e 6 (THR), quindi collegarli a C1.Aggiungi R1, il potenziometro (RV1) e i diodi D1 e D2 per formare i percorsi di carica e scarica.Questa configurazione consente di regolare il ciclo di lavoro in modo fluido senza grandi cambiamenti nella frequenza.
Passaggio 3: regolare la frequenza e il ciclo di lavoro
La frequenza operativa è impostata da R1, R2 e C1.Per la maggior parte dei motori CC, una gamma di 15–20 kHz funziona meglio: silenziosa ed efficiente.La regolazione del potenziometro modifica il ciclo di lavoro, che controlla la velocità del motore: un ciclo di lavoro più alto aumenta la velocità, mentre uno più basso la rallenta.Se il motore ronza alzare leggermente la frequenza;se il MOSFET si surriscalda, abbassare la frequenza o utilizzarne uno con un RDS più basso (acceso).
Passaggio 4: aggiungere il driver MOSFET
Collegare il pin 3 (OUTPUT) al gate MOSFET tramite un resistore da 100 Ω per ridurre il rumore di commutazione.Aggiungi un resistore da 100 kΩ dal gate a terra per mantenere spento il MOSFET all'avvio del circuito.Collegare il motore tra VCC e lo scarico del MOSFET, con la sorgente collegata a terra.Il timer 555 pilota solo il gate MOSFET, mentre il MOSFET gestisce la corrente che scorre attraverso il motore.
Passaggio 5: aggiungi protezione e stabilità
Posizionare un diodo flyback (1N5819) tra i terminali del motore, con il catodo rivolto verso VCC.Questo diodo assorbe i picchi di tensione causati dall'induttanza del motore durante la commutazione.Utilizzare condensatori di disaccoppiamento vicino al circuito integrato 555 e al cablaggio del motore per ridurre i cali di tensione e il rumore elettrico.
Passaggio 6: testare il circuito
Prima di collegare il motore, testare l'uscita del circuito utilizzando un LED o un oscilloscopio.Quando si gira il potenziometro, l'ampiezza dell'impulso dovrebbe cambiare visibilmente.Dopo aver confermato il segnale PWM, collegare il motore e verificare che la velocità risponda agevolmente alle regolazioni.
Passaggio 7: controlli finali
Utilizzare cavi corti e spessi per collegamenti ad alta corrente.Confermare che tutti i componenti soddisfino o superino la corrente di stallo nominale del motore.Se il MOSFET si surriscalda, collega un piccolo dissipatore di calore o utilizza un dispositivo con un valore RDS(on) inferiore.
Circuito PWM 555 e PWM basato su microcontrollore
|
Caratteristica |
555
Circuito PWM |
Microcontrollore
PWM |
|
Complessità |
Semplice da costruire con il minimo
componenti |
Più complesso;richiede codifica e
impostare |
|
Costo |
Molto basso;necessita solo di base
parti elettroniche |
Più alto;dipende da
microcontrollore e periferiche |
|
Efficienza energetica |
Buono, ma limitato dall'analogico
precisione |
Eccellente;digitale ottimizzato
controllare |
|
Adattabilità |
Manuale (tramite potenziometro) |
Completamente programmabile (software
controllare) |
|
Precisione e stabilità |
Moderare;può andare alla deriva con
variazioni di temperatura o tensione |
Alta precisione e stabilità
frequenza |
|
Gamma di frequenza |
Tipicamente da 1 Hz a 100 kHz |
Ampia gamma;può raggiungere livelli di MHz
a seconda dell'MCU |
|
Controllo del ciclo di lavoro |
Regolabile ma analogico e meno
preciso |
Digitale e altamente accurato (1%
o meglio) |
|
Integrazione del feedback |
Non supportato senza extra
circuiti |
Supporta facilmente sensori e
anelli di feedback (ad esempio PID) |
|
Scalabilità |
Un canale per IC (extra
i canali necessitano di più circuiti integrati) |
Canali PWM multipli integrati
la maggior parte dei microcontrollori |
|
Facilità d'uso |
Adatto ai principianti;nessuna codifica
necessario |
Richiede una programmazione di base
conoscenza |
|
Flessibilità |
Risolto una volta costruito |
Facilmente riconfigurabile tramite codice |
|
Dimensioni e integrazione |
Circuito discreto compatto |
Può far parte di un embedded più grande
sistema |
|
Gestione della potenza |
Necessita di componenti esterni (come
MOSFET) |
Necessita anche di driver ma si integra
meglio con i sistemi digitali |
|
Applicazioni |
Circuiti hobby, dimmerazione LED, DC
controllo motorio |
Robotica, automazione, avanzata
controllo motorio, gestione della potenza |
|
Manutenzione |
È necessaria la messa a punto dell'hardware
cambiamenti |
Aggiornamenti software;niente fisico
modifica richiesta |
|
Valore dell'apprendimento |
Ottimo per l'apprendimento dei principianti
elettronica analogica |
Ottimo per imparare a programmare e
sistemi di controllo digitale |
|
Ideale per |
Semplice, economico, autonomo
progetti |
Controllo preciso e scalabile
progetti di automazione |
Perché utilizzare un circuito motore 555?
Figura 6. Hardware di base che rende così utile un circuito motore PWM 555
Un circuito motore 555 PWM offre un modo semplice, conveniente ed efficiente per controllare la velocità dei motori CC senza sprecare energia sotto forma di calore.Invece di variare direttamente la tensione, accende e spegne rapidamente l'alimentazione, regolando il ciclo di lavoro per regolare la quantità di energia che raggiunge il motore.Questo metodo fornisce un controllo fluido e reattivo mantenendo elevata l'efficienza.
Uno dei motivi principali per utilizzare un circuito 555 PWM è la sua semplicità.L'IC timer 555 è economico, facile da trovare e richiede solo pochi componenti circostanti.Non necessita di programmazione o configurazione complessa, il che lo rende ideale per te e per progetti di prototipazione rapida.
È anche versatile.Lo stesso circuito di base può gestire un'ampia gamma di motori modificando il MOSFET e i valori dei componenti.Che tu stia regolando la velocità di un piccolo ventilatore, del motore di una macchinina o della luminosità di una luce a LED, il principio rimane lo stesso.
Inoltre, questo circuito offre un controllo efficiente della potenza.Poiché il transistor o MOSFET funziona come un interruttore anziché come un resistore, viene persa pochissima energia sotto forma di calore.Ciò mantiene sia i componenti che il motore più freddi, prolungandone la durata.
Per la maggior parte delle applicazioni a potenza medio-bassa, un circuito motore 555 PWM raggiunge il perfetto equilibrio tra costo, semplicità e prestazioni.È una scelta eccellente quando desideri un controllo affidabile della velocità senza la complessità dei microcontrollori o dei sistemi digitali.
Conclusione
Il controller 555 PWM è uno strumento semplice ed efficace per la gestione della potenza nei motori CC e nei LED.Offre un controllo fluido senza complessità o costi elevati.Sebbene i sistemi avanzati possano utilizzare microcontrollori, il timer 555 rimane un punto di partenza pratico e senza tempo per chiunque stia imparando l'elettronica.
test funzionali. I prodotti con il miglior rapporto qualità-prezzo e il miglior servizio sono il nostro impegno eterno.
Articolo caldo
- LM358 Doppia Amplificatore operativo Guida completa: pinout, diagrammi dei circuiti, equivalenti, esempi utili
- CR2032 e CR2016 sono intercambiabili?
- Comprensione delle differenze ESP32 ed ESP32-S3 Analisi tecnica e delle prestazioni
- Scegliere la batteria giusta: una guida agli equivalenti AG4, LR626, LR66, 177/376/377, SR626 e SR626SWSW
- Nozioni di base sui transistor BC547: piedinatura, circuiti applicativi, modelli alternativi/complementari
- NPN vs. PNP: Qual è la differenza?
- ESP32 vs STM32: quale microcontrollore è migliore per te?
- Cos'è un MOSFET e come funziona?
- Relè elettrico base: funzionamento di lavoro, tipi e usi
- Transistor PNP: struttura, principio di lavoro e applicazione
 Raspberry Pi Pico vs Arduino: quale scegliere?
Raspberry Pi Pico vs Arduino: quale scegliere?
2025-10-13
 Cos'è un diodo raddrizzatore e come funziona?
Cos'è un diodo raddrizzatore e come funziona?
2025-10-13
Domande frequenti [FAQ]
1. Qual è la frequenza PWM migliore per il controllo della velocità del motore CC con un timer 555?
Inizia a 18–20 kHz per evitare rumori udibili, quindi sintonizzati per temperature MOSFET più fredde e coppia stabile.
2. Come scelgo l'alimentatore per un controller motore 555 PWM?
Adattare la tensione del motore e superare la corrente di stallo del 25–50%.Utilizzare un'alimentazione regolata e aggiungere condensatori di massa vicino al carico.
3. Quale variante 555 dovrei utilizzare per progetti a bassa tensione o a batteria?
Utilizza una versione CMOS come TLC555 o LMC555.Assorbe meno corrente e funziona in modo affidabile a un VCC inferiore.
4. Come posso invertire un motore CC utilizzando un controller 555 PWM?
Aggiungi un modulo H-bridge.Alimenta il 555 PWM all'ingresso di abilitazione e utilizza gli ingressi del ponte H per la direzione.
5. Come posso misurare il ciclo di lavoro PWM senza un oscilloscopio?
Utilizzare un multimetro con modalità ciclo di lavoro.In alternativa, leggere la tensione media e calcolare all'indietro da Vavg ≈ Duty × VCC.
6. Perché il mio motore ronza o si contrae a bassa velocità?
Il servizio è troppo basso o la frequenza rientra nella gamma udibile.Aumentare la frequenza, impostare un limite di servizio minimo o aggiungere un avvio graduale.
7. Come posso ridurre al minimo il rumore elettrico e le EMI nella mia build 555 PWM?
Mantenere corti i circuiti ad alta corrente, attorcigliare i cavi del motore e posizionare il disaccoppiamento direttamente sull'IC e, se necessario, aggiungere uno smorzatore o un RC sul motore.
8. Un controller 555 PWM può pilotare più motori?
Condividi il segnale PWM ma utilizza un MOSFET e un diodo flyback separati per motore.Dimensiona ogni percorso per la sua corrente.
Numero di parte caldo
 M2BJ-B24-D
M2BJ-B24-D GRM1555C2A120JA01D
GRM1555C2A120JA01D GRM0225C1E1R7WA03L
GRM0225C1E1R7WA03L- GRM1555C1H8R4WA01D
 GRM2197U2A3R7CD01D
GRM2197U2A3R7CD01D GRM1886P1H7R7DZ01D
GRM1886P1H7R7DZ01D TAJB106M010H
TAJB106M010H KLDR002.TXP
KLDR002.TXP SMCJ6.0A
SMCJ6.0A IXTA3N120
IXTA3N120
- MB96F346RSBPQC-GSE2
- MAX3072EEPA+
- Z8523008VSG
- AT29C256-70JI
- AGL250V5-VQ100I
- MT47R64M16HR-25E:H
- MAX527DCWG
- V48B12C250AN
- XC5VSX50T-2FF1136I
- MSP430F2121IRGER
- NBC12430FAR2G
- M74HC00RM13TR
- ADCS7476AIMFE/NOPB
- STM32F103VDT6TR
- TLV320AIC34IZAS
- UCC28C43DGKR
- LD39050PU33R
- LMR16020PDDAR
- ALM-2812-TR1
- BA9737KV
- BCM3310KPB
- HM514400CLS-7
- IS62WV2568BLL-45TLI
- K9F1208U0B-PIB0000
- LA71207M-MPB
- LC4256C-75TN176-10I
- M28W160CB70N6
- M36W0T6040T1ZAQ
- MAX9315EUP-T
- MT48H4M16LFB4-8IT
- PI74FCT2240TQ
- STM32F100R6H6
- TMP101NA
- AN8806SB-E1
- HX6A08-A000LAG
- LM3414HVMR/MR
- MT1389DXE-GDAL
- VJ1111D100JXEQJHT
- WS57C64F-70D